Overview
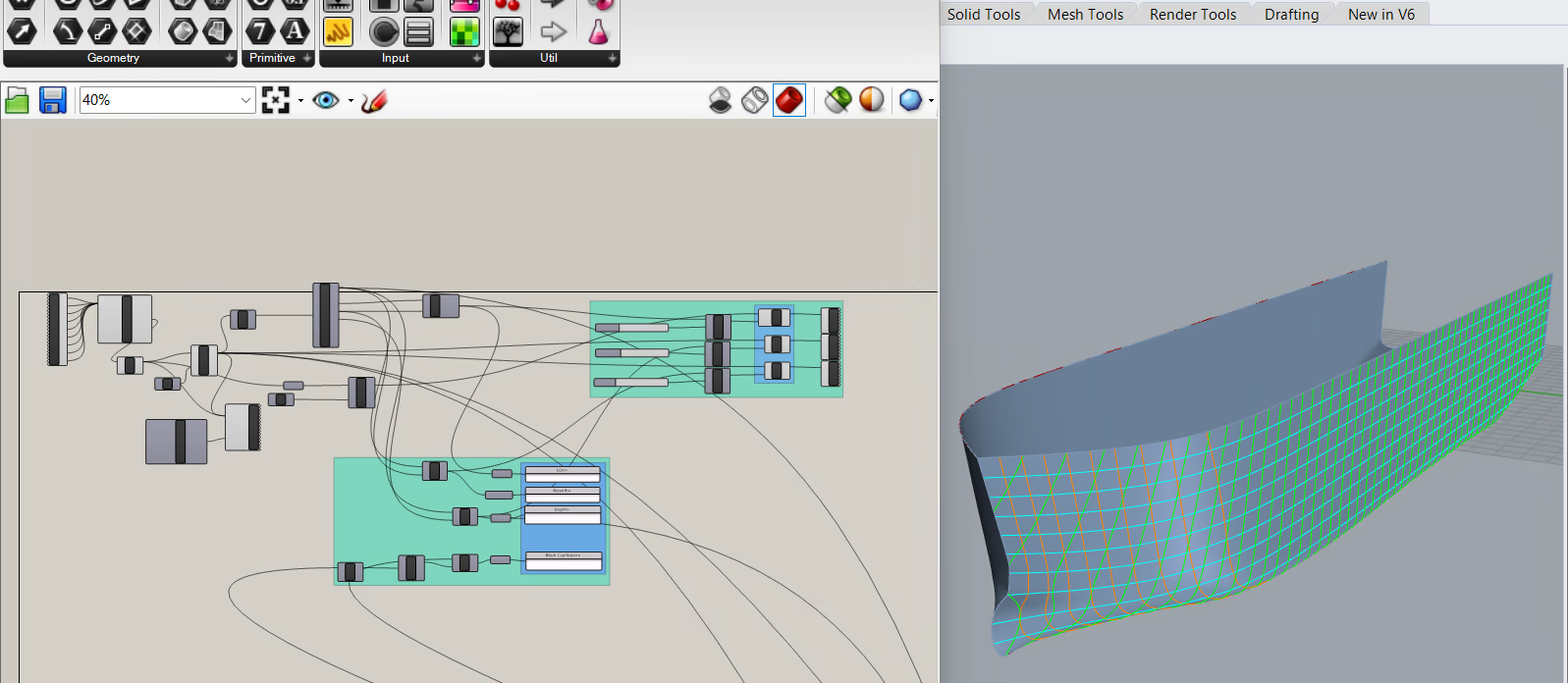
This is a 230 m class dynamic-positioning drillship concept designed to support deepwater drilling and heavy subsea operations with high operational autonomy. The project focuses on parametric hull design using Rhino and Grasshopper and superstructure modelling, so we can rapidly iterate hull forms for different client missions and Parametric Survey.
Status: Conceptual CAD & parametric models complete.
.avif)
Baked hull render
.avif)
Full modelled render
.avif)
Rendered view
Design Highlights
- Parametric hull architecture: station-based hull that allows LOA/beam/draft/Cp adjustments and instant recalculation of hydrostatics.
- Modular deck system: configurable slots for derrick module, moonpool, riser handling, and containerized systems — enables rapid role change.
- Dynamic positioning ready: azimuth thruster layout, tunnel thrusters and redundant power generation modelled for DP2/DP3 capability.
- Heavy-lift capability: two high-capacity pedestal cranes (modelled envelopes and load paths) for subsea deployment and BOP handling.
- Reinforced hull zones: local strengthening under crane foundations, moonpool ring stiffeners and engineered collision bulkheads.
- Crew & logistics: accommodation block, heli-deck position, lifeboat/LOA access and service corridors modelled to minimize interference with operational areas.
Key Specifications
| Parameter | Value (indicative) |
|---|---|
| Length Overall (LOA) | 230 m (Variable/Changable) |
| Beam | ~ 42 m (Variable/Changable) |
| Depth | ~ 18 m (Variable/Changable) |
| Design Draft | ~ 11–12 m (Variable/Changable) |
| Role | Drillship / deepwater MODU (DP2/DP3 configuration possible) |
| Key features | Moonpool, drilling derrick, 2 × pedestal cranes, DP thruster banks, diesel-electric power plant |